Virtual reality (VR) technologies have been shown to be effective for teleoperation, or human operation of a machine at a distance. For instance, the integration of teleoperator and VR technologies allows for more accurate and safe human operation of machinery under high-risk conditions by providing immersive and realistic experiences. Particularly interesting in the body of research on VR-based teleoperators is the finding that rendering realism or human-likeness into the virtual body of a teleoperator seems to contribute to the perceptual illusion that the telerobot’s hands are part of worker’s body. Previous studies have shown that such an illusion improves the controllability of teleoperators and therefore enhances task performance.
However, a recent study by Mincheol Shin, who joined our NMD team this semester as an assistant professor, suggests that a human-like virtual body may not only have positive outcomes when operators carry out high-risk tasks. Although the use of a human-like virtual hand for teleoperation might enhance perceived body ownership of a teleoperator, Mincheol suspected that this may at the same time incur negative effects on workers’ task performance and their intention to use a VR-based teleoperator in the future, as a human-like virtual body may increase the level of perceived risk.
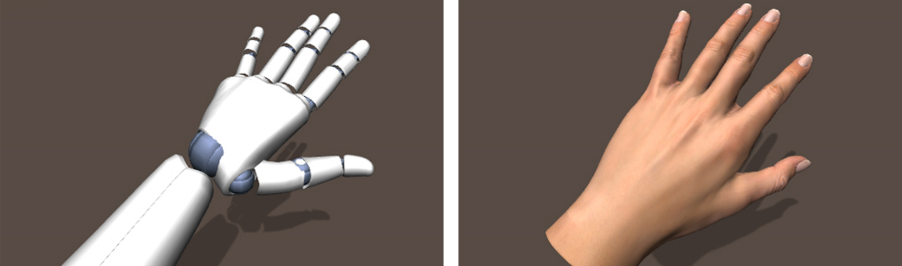
Robotic and human-like virtual hands used in the experiment (Retrieved from Leap Motion)
To research this further, Mincheol and his team compared a robotic and a human-like virtual hand in a virtual factory environment that allows for the teleoperation of a metal press machine in a virtual environment. Natural three-dimensional movement of a virtual hand was rendered using the Leap Motion software development kit (SDK), which allows for the seamless tracking of the forearm and fingers without the use of wearable devices (i.e., gloves). For the rendering of both robotic and human-like virtual hands, the Leap Motion core asset was used.
In the experiment, participants were instructed to put themselves into the shoes of factory workers who operate machinery using a VR-based teleoperator at a distance. In the virtual factory environment, participants were assigned a task that involved grasping raw material and placing it under a metal press machine. After the machine pressed the raw material, participants were to complete the task by grasping the processed material and placing it on a conveyor belt. During the task, participants were interrupted by the sound of an alarm if their hands got trapped in the machine, which indicated failure of the task, after which they had to restart. To manipulate the perceived risk of danger, different pressing intervals were implemented: 3 seconds in the low-risk condition and 1 second in the high-risk condition.
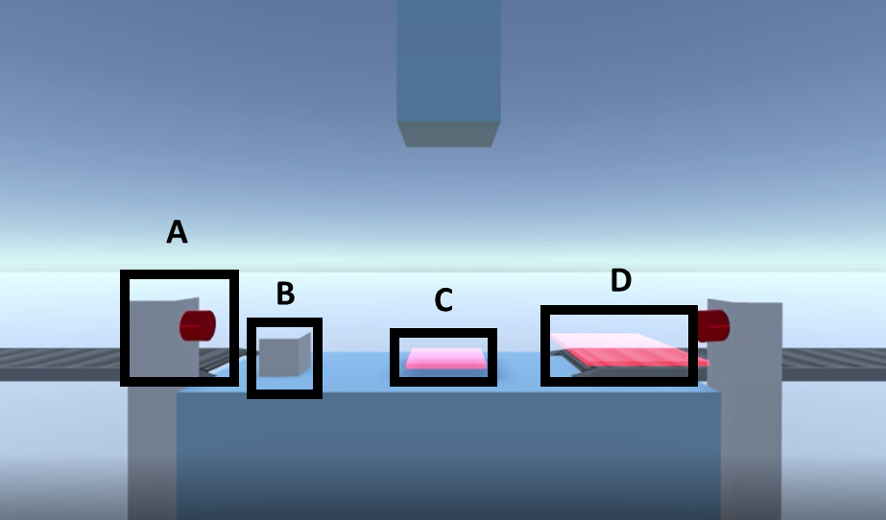 The virtual factory environment developed for the experiment showing the start button (A), the raw material (B), the metal press machine (C) and the conveyor belt situated on the right side of the work desk (D).
The virtual factory environment developed for the experiment showing the start button (A), the raw material (B), the metal press machine (C) and the conveyor belt situated on the right side of the work desk (D).
Mincheol’s research confirmed his suspicion, as he found that the rendering of realism into a virtual body for VR-based teleoperation paradoxically decreased the workers’ task performance by increasing their perceived risk. In addition, this increase in risk perception was found to reduce the intention to use the VR-based teleoperator in the future. Mincheol’s findings suggest that the enhancement of perceived embodiment in VR-based teleoperation may backfire when the risk of danger is high.
As such, while rendering realism into new media technologies has long been assumed to have positive effects on user’s perceptions, this study demonstrates that realism could backfire depending on situational contexts. To both HCI researchers and UX designers, the findings of this research provide some food for thought with respect to the role of realism in designing new media technologies.
This research was published in the journal Computers in Human Behavior and can be accessed via this link to the paper).